Kuavo 5-W G12手柄操作
Kuavo 5-W G12手柄操作
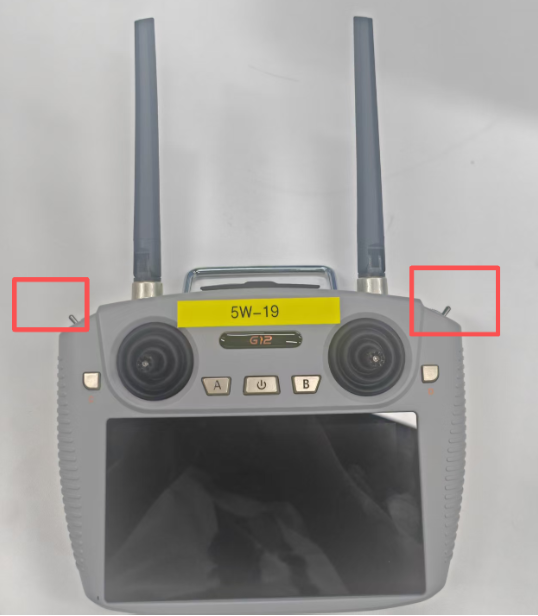
1. G12遥控器开机
长按开机键,机器人出场已经对频完成,开机之后自动连接机器人。

2. 机器人底盘控制
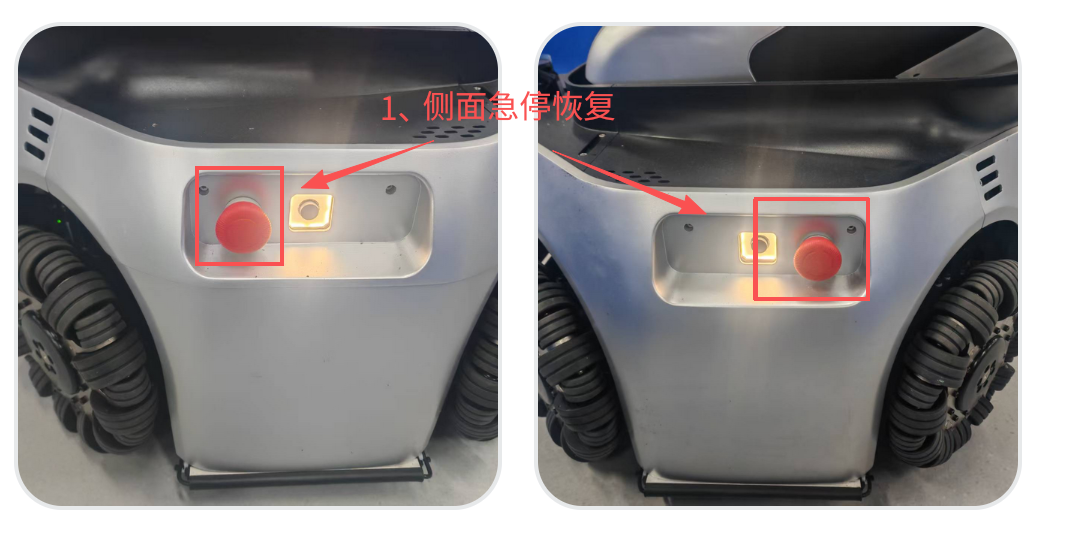
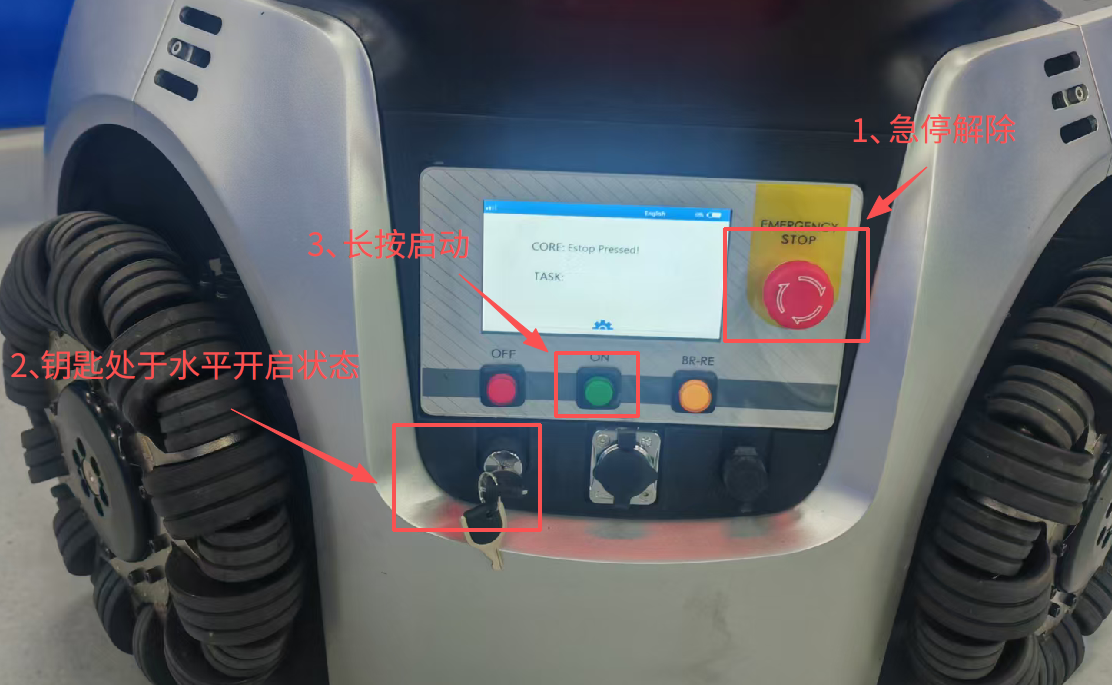
1、首先将机器人底盘三个急停恢复,然后将底盘钥匙拨到开启位置,最后长按启动按键将底盘开机,如图所示:
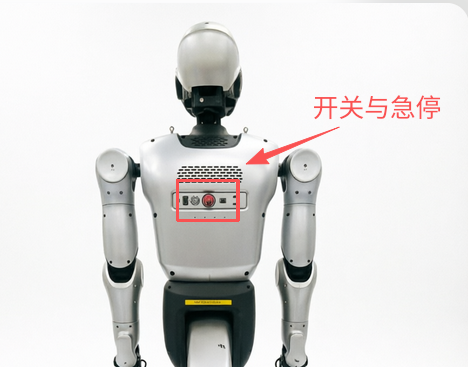
2、将机器人上半身急停恢复,开关启动,如图所示:
3、将G12手柄上方的左边拨杆拨到最左边,右边的拨杆拨到最右边,如图所示:
4、按一下C键

5、当机器人手臂抬起,继续按下C键。
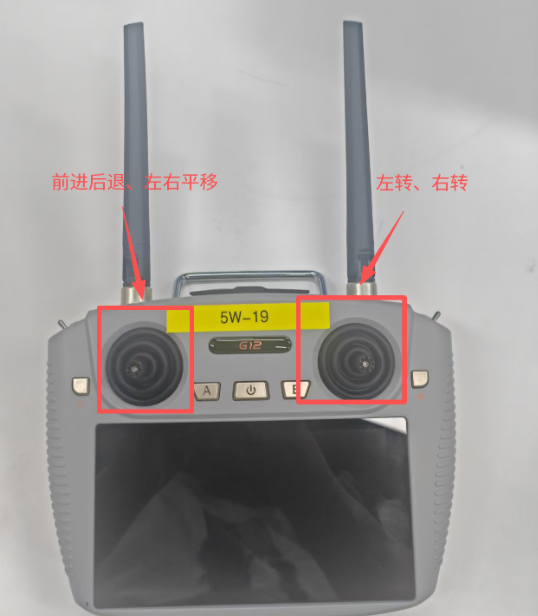
6、现在就可以用手柄摇杆进行底盘的控制
7、如果发现底盘不动,上半身轻微晃动,需要重新启动底盘服务,在下位机中进行如下操作:
新建终端,使用 SSH 登录底盘主机(密码:133233)
ssh -oKexAlgorithms=+diffie-hellman-group14-sha1 \
-oHostKeyAlgorithms=+ssh-rsa \
-oCiphers=+aes128-cbc,3des-cbc \
ucore@192.168.26.22
sudo systemctl restart urobot.service
3. 机器人关闭控制
1、将G12手柄上方的左边拨杆拨到最左边,右边的拨杆拨到最右边,如图所示:
2、同时长按C加D键,机器人双臂放下,表明关闭控制成功。

